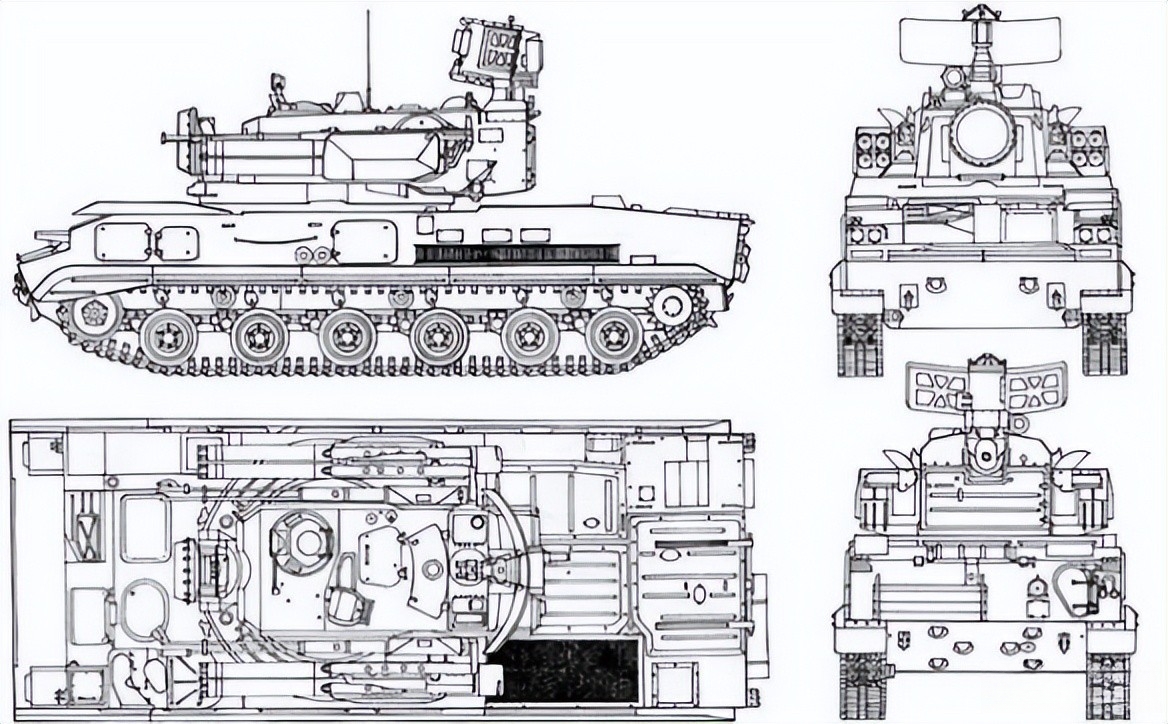
9K22“通古斯卡”


9K22防空系统的研发始于1970年6月8日。应苏联国防部的要求,图拉的机械制造设计局(KBP)在指定的总设计师A.G. 希普诺夫的指导下,开始研制一种30毫米口径的防空系统,以取代23毫米口径的ZSU-23-4自行高炮。
这个代号为“通古斯卡”的项目,旨在改进ZSU-23-4已被观察到的缺点(射程短且没有预警能力),并应对正在研发中的新型对地攻击机,比如A-10“雷电Ⅱ”攻击机,这种飞机设计得对23毫米口径火炮具有很强的抗性。研究表明,与ZSU-23-4的23毫米火炮相比,30毫米火炮摧毁给定目标所需的炮弹数量要少两到三倍。而且,当向以300米/秒速度飞行的米格-17(同样,在战争情况下,北约的霍克“猎人”或菲亚特G.91 战斗机也是如此)射击时,相同质量的30毫米炮弹的杀伤概率比23毫米炮弹高1.5倍。此外,最大交战高度从2000米增加到了4000米,在打击轻型装甲地面目标时的效能也有所提高。
对该系统设定的最初要求是,在射程、射高和作战效能方面达到ZSU-23-4的两倍,此外,该系统的反应时间不应超过10秒。由于火炮和导弹的火控系统有相似之处,因此决定“通古斯卡”将是一种弹炮结合系统。通过将火炮和导弹结合起来,该系统比ZSU-23-4更有效,能用导弹打击远距离目标,用火炮打击近距离目标。
除了KBP作为主要承包商外,苏联军工综合体的其他成员也参与了该项目。底盘由明斯克拖拉机厂研发,无线电设备由乌里扬诺夫斯克机械厂研发,中央计算机由全俄电子机械科学研究所(“安泰”)研发,制导和导航系统由全俄“信号”科学研究所研发,光学设备由列宁格勒光学机械联合企业(LOMO)研发。
然而,在1975年至1977年间,随着9K33“黄蜂”导弹系统的推出,研发工作有所放缓,因为“黄蜂”系统似乎能满足同样的需求,而且导弹性能更优。经过一番激烈的讨论,人们认为,纯导弹系统在应对毫无预警就从极近距离发起攻击的超低空飞行攻击直升机时,效果不如弹炮结合系统,就像1973年阿以战争中所证明的那样,弹炮结合系统在这种情况下非常成功。由于火炮系统的反应时间约为8至10秒,而基于导弹的系统反应时间约为30秒,因此研发工作重新启动。
最初的设计于1973年完成,1976年乌里扬诺夫斯克机械厂完成了样机生产。1980年9月至1981年12月期间,在东古兹靶场进行了系统测试和试验。1982年9月8日,该系统正式列装,最初版本编号为2K22/2S6,有四枚导弹处于待发状态(两侧各两枚)。1984年,当第一批“通古斯卡”防空系统交付给军队时,它开始有限度地投入使用。
在最初版本的9K22进行了有限生产后,改进版本编号为2K22M/2S6M的系统于1990年列装。2K22M有多项改进,包括八枚待发导弹(两侧各四枚),以及对火控程序、导弹的改进和系统整体可靠性的提升。
2003年,俄罗斯武装部队列装了“通古斯卡-M1”(2K22M1),“通古斯卡”系统得到了进一步改进。M1型引入了新型的9M311-M1导弹,进行了多项改进,通过用无线电引信取代八束激光近炸引信,使2K22M1能够打击像巡航导弹这样的小型目标。其他改进还包括通过用脉冲红外信标取代导弹跟踪曳光管,提高了对红外对抗措施的抗性。其他改进措施包括将导弹射程从8公里增加到10公里,改进了光学跟踪性能和精度,改善了防空连各组件与指挥站之间的火控协调能力。总体而言,“通古斯卡-M1”的作战效能比“通古斯卡-M”高1.3至1.5倍。
直到最近,“通古斯卡”系列一直是一种独特且极具竞争力的武器系统。不过,2007年,KBP开始生产“铠甲”弹炮结合系统——“通古斯卡”的衍生型号,“铠甲”系统的性能比其前身更优。
SA-19的射击交战流程
- 概述。SA-19导弹是一种两级指令制导导弹。该导弹系统由火控单元、发射装置、导弹跟踪器和装在发射筒内的导弹组成,并由2S6M上的直视光学装置(DVO)和“热闪”目标跟踪与搜索雷达提供支持。典型反应时间为8至12秒。
火控系统。2S6M的综合火控系统包含以下组件:
目标搜索雷达(TAR)(1RL144),工作在E波段,最大作用距离20公里。
目标跟踪雷达(TTR)(1RL144M),工作在J波段,最大作用距离18公里。
敌我识别系统(1RL138),工作在C波段和D波段。
直视光学装置(DVO)。
火控计算机。
目标搜索雷达天线安装在炮塔后部,不使用时可折叠放下。该雷达除了能测量目标距离和方位外,还具备主要的搜索能力。该雷达可探测到距离最远约20公里的目标。它是一个相干系统,精度足以作为火控的距离备份。目标搜索雷达发射一个扇形波束,方位覆盖4.50度,仰角覆盖150度。波束指向恒定仰角7.50度,以便探测低空目标。天线转速约为每秒1转,能快速更新2S6M周围空域的情况。目标搜索雷达选择E波段频率具有一定优势,因为在这种频率下,恶劣天气(雨、雪和雾)中的信号衰减较小,因此在这种条件下搜索雷达的性能不会下降。
目标跟踪雷达天线安装在炮塔前部,根据选择使用火炮还是导弹,具有两项基本功能。跟踪雷达不断将目标距离、仰角和方位信息传送给火控计算机,计算机根据这些数据生成武器系统的瞄准指令。稳定的光学瞄准具用作备用跟踪通道,可将目标数据传送给火控计算机。该瞄准具还用于计算导弹飞行轨迹与视线的偏差,这些数据会自动传送给火控计算机,并用于生成修正信号。在使用火炮交战时,目标跟踪雷达作为自动目标跟踪器,向火控计算机输入目标位置数据。
在使用导弹交战时,跟踪雷达锁定目标,然后将光学瞄准具对准目标。随后,炮手通过光电瞄准具承担目标跟踪任务,而雷达则用于向SA-19导弹传送制导指令。跟踪雷达发射脉冲位置调制编码用于导弹制导。目标跟踪雷达是一种双通道单脉冲设计,具有动目标显示(MTI)处理器和数字距离跟踪系统。跟踪雷达通常由目标搜索雷达提供的粗略距离和角度数据引导。或者,目标信息也可以通过指挥控制网络传递。
射击交战流程。在使用导弹交战时,雷达首先像使用火炮时一样锁定目标,然后将随动光学瞄准具对准目标。随后,炮手通过光学瞄准具承担目标跟踪任务,而雷达则用于向飞行中的导弹传送轨迹修正指令。在发射导弹前,炮塔会稍微偏离轴线转动,这样发射产生的烟雾就不会遮挡对目标的视线。在发射过程中,2S6M必须保持静止,以避免导弹离开发射管时受到损坏。发射后,武器系统会立即再次下降到锁定位置(-60度),以保持视线畅通,并且在目标跟踪过程中炮塔不会移动。
导弹由火箭助推器加速到约900米/秒(3马赫)。助推器分离后,导弹尾部的脉冲光源启动,使光学瞄准具能够自动跟踪飞行中的导弹。在导弹的整个飞行过程中,炮手必须始终将光学瞄准具的十字线对准目标;导弹飞行轨迹与视线的偏差会自动计算,并用于生成航向修正信号。然后,这些信号通过跟踪雷达传送给飞行中的导弹,在导弹交战过程中,跟踪雷达同时兼作火控雷达。只有在白天和能见度良好的条件下才能使用导弹,因为在整个交战过程中,需要用光学瞄准具跟踪目标。
工作模式。2S6M的雷达和火控系统可以采用五种不同的工作模式:
模式1:雷达自动跟踪。这是主要工作模式。
模式2:手动光电角度跟踪,距离数据来自任意一部雷达。
模式3:惯性跟踪。
模式4:雷达辅助手动光电角度跟踪并估计距离。
模式5:打击地面目标。
在主要工作模式下,跟踪雷达锁定目标后,跟踪是自动进行的,大多数数据会直接传送给计算机。光学瞄准具可以随动于目标视线(为发射导弹做准备),也可以独立用于进一步的目标搜索。武器会自动瞄准,操作人员的任务仅限于选择武器并按下射击键;如前所述,使用导弹时,炮手必须在整个交战过程中始终将瞄准具对准目标。其余三种工作模式用于在系统性能下降的情况下,绕过出现故障的子系统,或用备用工作模式取代它。然而,这些模式的精度较低和/或操作速度较慢,并且车辆必须保持静止。第五种模式用于打击地面目标。此时雷达系统关闭,光学瞄准具中会插入标线;提前量会根据方位和距离自动计算,然后瞄准速度与炮手操纵杆的移动成比例。
